IEEE SSRR 2024
IEEE International Symposium on Safety Security Rescue Robotics 2024

The safety, security, and rescue robotics community focuses on the ethical use of robots for public safety and security applications, such as law enforcement, anti-terrorism, nuclear decommissioning, and inspection of critical infrastructure, all phases of emergency management (presentation, preparedness, response, and recovery), and humanitarian assistance and disaster relief. Robot safety and risk of robots in general, for example preventing injuries or guaranteeing real-time execution, are not topics included in the symposium’s purview but safety and risk in the context of the extreme environments and operating conditions of SSRR applications is. SSRR is a field robotics domain, and although papers describing theoretical results are welcome, all papers should be motivated by real users’ needs, both clearly stating who are the end users and what are the anticipated or demonstrated practical end user requirements.
IEEE SSRR was started in 2002 with a special mission to bring together roboticists and practitioners, where academics can present domain-relevant research and engage with agencies, responders, and companies. The conference is single track with full papers published in IEEE Xplore. It traditionally sets aside time for field tours of training facilities or hosts exercises. It is a hands-on, community-oriented conference. There is a best paper award.
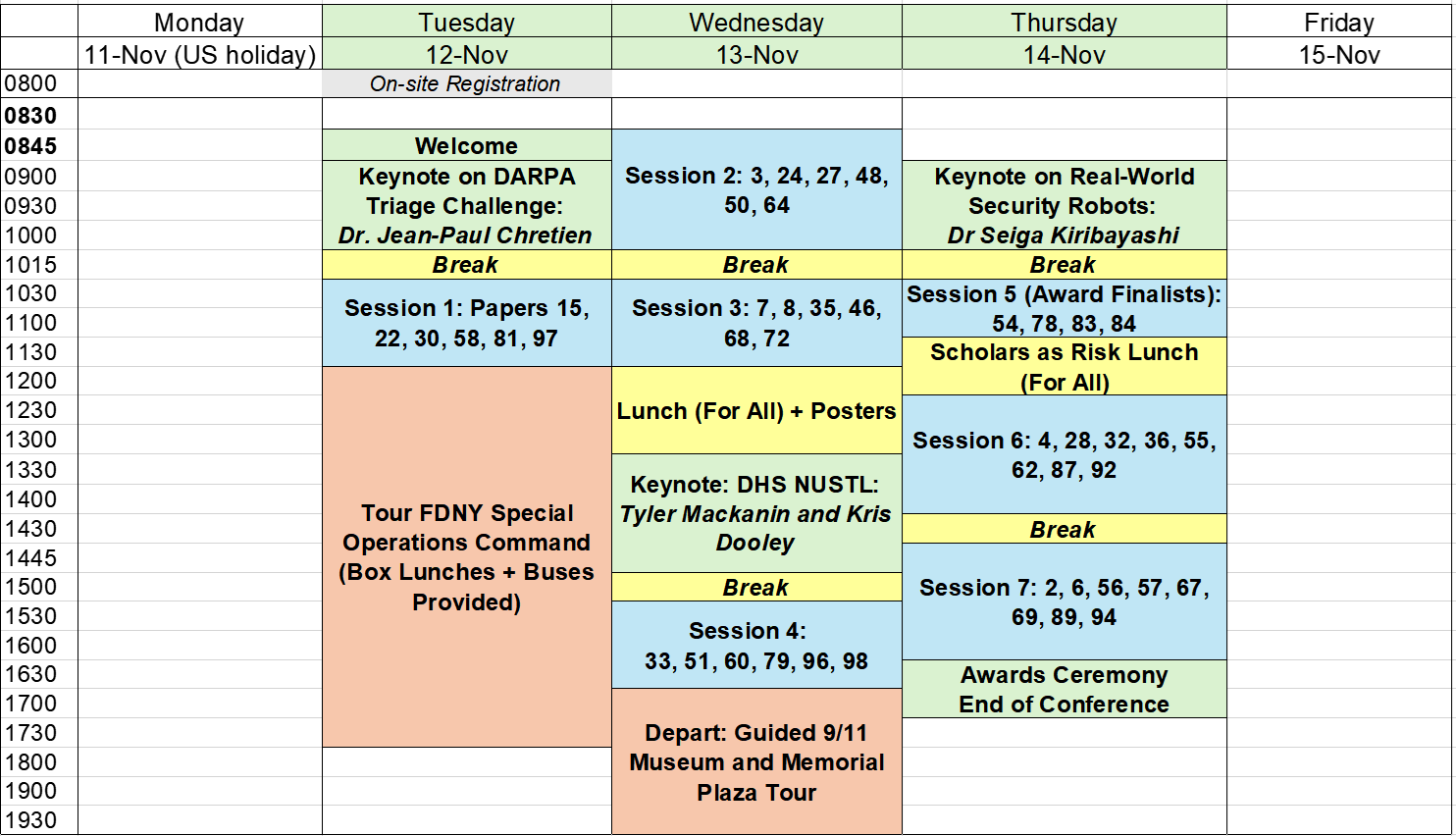
SSRR 2024 will host two special events. Honoring our history of hands-on participation and engaging with practitioners, we will tour the Fire Department of New York training center hosted by FDNY Robotics. Instead of a banquet, SSRR 2024 will have a guided tour of the 9/11 Memorial Museum ending at the Memorial Plaza just as the lights representing the twin towers are turned on. This is particularly meaningful as the SSRR Technical Committee and conference were established in the wake of the 9/11 World Trade Center attack.
Conference Schedule
Session Assignments
Conference proceedings are available for download by registered conference attendees.
| Session # | Paper # | Title | Authors |
|---|---|---|---|
| 1 | 15 | Real-Time Dynamic Gesture Recognition for Human-Robot Collaboration in Rescue Operations | Dewangan, Shefali (Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFK) Origanti, Vamsi Krishna (Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFK) Kirchner, Frank (University of Bremen) |
| 1 | 22 | Glasgow Coma Score Estimation Module for Deployment on Mobile Robots in Rescue Missions | Schwegmann, Holger (University of Lübeck) Kiefer, Bernd (DFKI) Plagge, Tom (University of Lübeck) Ernst, Floris (University of Lübeck) |
| 1 | 30 | Robot Path Planning Utilizing Object Recognition for Inspection of Nuclear Material Containers | Balan, Karthika (Lawrence Berkeley National Laboratory) Li, Pei Yao (Lawrence Berkeley National Laboratory) Rofors, Emil (Lund University) Kushant Patel, Kushant (Lawrence Berkeley National Laboratory) Park, Ki (Nevada National Security Sites (RSLN)) Godfrey, Edward (Nevada National Security Site) Salathe, Marco (Lawrence Berkeley National Laboratory) Quiter, Brian (Lawrence Berkeley National Laboratory) Bandstra, Mark (Lawrence Berkeley National Laboratory) MacDonald, Thomas (Lawrence Berkeley Lab) |
| 1 | 58 | Reinforcement Learning for Wheeled Mobility on Vertically Challenging Terrain | Xu, Tong (George Mason University) Pan, Chenhui (George Mason University) Xiao, Xuesu (George Mason University) |
| 1 | 81 | Rescue Robotics: What We Learned from Paramedics, Dentists and Industrial Productions to Develop Robotic En-Route Interventions | Parhofer, Christoph August Wilhelm (Technical University Munich) Ambros, Julius (Technical University of Munich) Miller, Maximilian Franz (Technical University of Munich – Institute for Micro Technology ) Lueth, Tim C. (Technical University of Munich) |
| 1 | 97 | Fuel Debris Simulants for the Gripper Design of Decommissioning Robot Manipulator in Fukushima Daiichi (1F) | Nakashima, Shinsuke (The University of Tokyo) Moro, Alessandro (Ritecs Inc.) Komatsu, Ren (The University of Tokyo) Faragasso, Angela (Finger Vision Inc.) Matsuhira, Nobuto (Shibaura Institute of Technology, The University of Tokyo) Woo, Hanwool (Kogakuin University) Kawabata, Kuniaki (Japan Atomic Energy Agency) Yamashita, Atsushi (The University of Tokyo) Asama, Hajime (The University of Tokyo) |
| 2 | 3 | A Control Barrier Function Based Visual Servoing Framework for Safe Operation of UAVs in GNSS Denied Settings Using Fiducial Markers | Lynch, Angus (University of Auckland) Lyu, Chen (The University of Auckland) Buzzatto, Joao (The University of Auckland) Heshmati-alamdari, Shahab (Aalborg University) Liarokapis, Minas (The University of Auckland) |
| 2 | 24 | Path Planning for the Autonomous Inspection of Voxelized Structures | Hagmanns, Raphael (Karlsruhe Institute of Technology) Ruf, Boitumelo (Fraunhofer IOSB, Karlsruhe) Bockmühl, Rabanus (Fraunhofer IOSB) Weißer, Max (Karlsruhe Institute of Technology (KIT)) Beyerer, Jürgen (Fraunhofer Gesellschaft) |
| 2 | 27 | Monte Carlo Tree Search for Behavior Planning in Autonomous Driving | Wen, Qianfeng (University of Toronto) GONG, ZHONGYI (Bosch (China) Investment Ltd.) Zhou, Lifeng (Drexel University) Zhang, Zhongshun (University of Maryland, College Park) |
| 2 | 48 | When to Localize?: A POMDP Approach | Williams, Troi (University of Maryland) Torshizi, Kasra (University of Maryland) Tokekar, Pratap (University of Maryland) |
| 2 | 50 | Human-Robot Team Vulnerabilities under Fatigue During sUAS Disaster Response Simulations | Mehta, Ranjana (University of Wisconsin Madison) Yadav, Aakash (Texas A&M University) Murphy, Robin (Texas A&M) Peres, S Camille (Texas A&M University) |
| 2 | 64 | Detection and Classification of Small-Sized UAVs and Birds in Sparse LiDAR Point Cloud | Balla, Krisztian (HUN-REN Institue for Computer Science and Control) Keszler, Anita (HUN-REN SZTAKI Institute for Computer Science and Control) Gazdag, Sándor (SZTAKI) Sziranyi, Tamas (MTA SZTAKI) Majdik, Andras (HUN-REN Institute for Computer Science and Control (SZTAKI)) |
| 3 | 7 | Platform Evaluation of Digital Mock-Up System Utilized for Decommissioning in Fukushima Daiichi NPS | Sakaue, Tomoki (Tokyo Electric Power Company Holdings, Inc.) Abe, Fumiaki (Tokyo Electric Power Company Holdings, Inc.) |
| 3 | 8 | A Holistic Concept on AI Assistance for Robot-Supported Reconnaissance and Mitigation of Acute Radiation Hazard Situations | Daun, Kevin (Technische Universität Darmstadt) Bark, Frederik Alexander (Technische Universität Darmstadt) von Stryk, Oskar (Technische Universität Darmstadt) Tateo, Davide (Technische Universität Darmstadt) Peters, Jan (Technische Universität Darmstadt) Wendt, Janine (Technische Universität Darmstadt) Heidemann, Nils (German Rescue Robotic Center) Kruijff-Korbayova, Ivana (German Rescue Robotics Center (DRZ)) Kohlbrecher, Stefan (Energy Robotics GmbH) Friedrich, Jens (Telerob Gesellschaft für Fernhantierungstechnik mbH) |
| 3 | 35 | Efficient Line-Of-Sight Viewpoint Sampling in Complex Environments for Autonomous Surface Inspection | Moon, Sangwoo (Jet Propulsion Laboratory, NASA) Kim, Sung-Kyun (NASA Jet Propulsion Laboratory, Caltech) Peltzer, Oriana (Stanford University) Kochenderfer, Mykel (Stanford University) Khattak, Shehryar (NASA Jet Propulsion Laboratory) |
| 3 | 46 | Universal Multi-Layer Map Display and Improved Situational Awareness in Real-World Facilities | Edlinger, Raimund (University of Applied Sciences Upper Austria) |
| 3 | 68 | LiDAR-Based Registration against Georeferenced Models for Globally Consistent Allocentric Maps | Quenzel, Jan (University of Bonn) Mallwitz, Linus T. (University of Bonn) Imbusch, Benedikt T. (University of Bonn) Behnke, Sven (University of Bonn) |
| 3 | 72 | HERO: A Cross-Domain Human-Enhanced Robot Orchestration Framework for Seamless Multi-Robot Emergency Handling | Freytag, Julia (Fraunhofer Institute for Material Flow and Logistics (IML)) Ogorelysheva, Natalia (Fraunhofer Institute for Material Flow and Logistics (IML)) Böcker, Stefan (TU Dortmund University) Priyanta, Irfan Fachrudin (Chair of Material Handling and Warehousing) Jost, Jana (Fraunhofer Institute for Material Flow and Logistics) Grafe, Robert (German Rescue Robotic Centre) Wietfeld, Christian (TU Dortmund University) Kirchheim, Alice (TU Dortmund) |
| 4 | 33 | An Ultra-Light, Ultra-Fast, Passive Closing Aerial Gripping System Capable of Grasping, Perching, and Aerial Manipulation | Lin, Shaoqian (The University of Auckland) Lynch, Angus (University of Auckland) Liarokapis, Minas (The University of Auckland) |
| 4 | 51 | Field Insights for Portable Vine Robots in Urban Search and Rescue | McFarland, Ciera (University of Notre Dame) Dhawan, Ankush (Stanford University) Kumari, Riya (University of Maryland, College Park) Council, Chad (MIT Lincoln Laboratory) Coad, Margaret M. (University of Notre Dame) Hanson, Nathaniel (Massachusetts Institute of Technology) |
| 4 | 60 | Rapidly Deployable Vine-like Monitoring Device for Elevated Positions | Feng, Yunhao (Tokyo institute of Technology) Kodama, Hiroto (Institute of Science Tokyo) Ide, Tohru (Tokyo institute of Technology) Yamamoto, Akina (Tokyo Institute of Technology) Nabae, Hiroyuki (Institute of Science Tokyo) Suzumori, Koichi (Tokyo Institute of Technology) |
| 4 | 79 | Heterogenous Collaboration: A New Approach for Search and Rescue Operations | Nimako-Boateng, SIDNEY (Carnegie Mellon University) Singh, Shashwat (Carnegie Mellon University) Ugur, Mustafa (Purdue University) Wang, Sicheng (Purdue University) Olivia, Sobek, Olivia (University of Pittsburgh) Osei, Isaac (Carnegie Mellon University) Kramer, Max (Carnegie Mellon University) Orta Martinez, Melisa (Carnegie Mellon University) Temel, Zeynep (Carnegie Mellon University) Blumenschein, Laura (Purdue University) |
| 4 | 96 | Rapid Soil Surface Reinforcement Method Using Flour for Soft Ground in Disaster Response Robotics | Kojima, Shotaro (Tohoku University) Ohno, Kazunori (Tohoku University) Nara, Takaaki (Tohoku University) Satomi, Tomoaki (Tohoku University) TAKAHASHI, Hiroshi (Tohoku University) Tadokoro, Satoshi (Tohoku University) |
| 4 | 98 | Modular, Tethered, Reconfigurable Hybrid Robotic Vehicles for Aerial Grasping and Package Delivery | Kobayashi, Masahiro (The University of Auckland) Huang, Geoffrey (The University of Auckland) Buzzatto, Joao (The University of Auckland) Lynch, Angus (University of Auckland) Kyriakopoulos, Kostas (New York University – Abu Dhabi) Liarokapis, Minas (The University of Auckland) |
| 5 (Award) | 54 | Rapid Quadrotor Navigation in Diverse Environments Using an Onboard Depth Camera | Lee, Jonathan (Carnegie Mellon University) Rathod, Abhishek (Carnegie Mellon University) Goel, Kshitij (Carnegie Mellon University) Stecklein, John (Carnegie Mellon University) Tabib, Wennie (Carnegie Mellon University) |
| 5 (Award) | 78 | KRIS: A Robot for Material Transport in Relief Situations | Mallwitz, Martin (DFKI/RIC) Weissenrieder, Daniel (Federal Agency for Technical Relief (THW)) Origanti, Vamsi Krishna (Deutsches Forschungszentrum für Künstliche Intelligenz GmbH (DFK) Becker, Tom (DFKI) Sixt, Milan (DFKI) Helapita Ralalage, Malika Warunamal Navaratna (DFKI Gmbh) Bernhard, Felix (University of Bremen) Schoo, Christian (DFKI) Martínez Genis, Miguel Adad (DFKi) Maas genannt Bermpohl, Fabian (DFKI GmbH) Kirchner, Frank (University of Bremen) Yüksel, Mehmed (DFKI GmbH) |
| 5 (Award) | 83 | Navigating the Edge: UAV Boundary Tracing for Efficient Volcanic Plume Monitoring | Ericksen, John (University of New Mexico) Islam, Abir (University of New Mexico) Frost, Carter (University of New Mexico) Aubert, Kevin (University of New Mexico) Fricke, George Matthew (The University of New Mexico) Dani, Varsha (Rochester Institute of Technology) Fierro, Rafael (University of New Mexico) Fischer, Tobias P. (University of New Mexico) Nowicki, Scott (NV, University of New Mexico) Saia, Jared (University of New Mexico) Moses, Melanie (University of New Mexico) |
| 5 (Award) | 84 | Heterogeneous Multi-Robot Person-Following in Constrained Environments | Miller, Ori (University of Denver) Reardon, Christopher M. (MITRE) Gregory, Jason M. (US Army Research Laboratory) |
| 6 | 4 | Leveraging Augmented Reality for Improved Situational Awareness During UAV-Driven Search and Rescue Missions | Nalamothu, Rushikesh (Saint Louis University) Sontha, Puneet (Saint Louis University) Karravula, Janardhan (saint louis university) Agrawal, Ankit (Saint Louis University, Saint Louis, MO, USA) |
| 6 | 28 | Cognitive Workload Estimation Using LSTM and Ensemble Learning on Multimodal Physiological Data | Singh, Gaganpreet (University of Bundeswehr) Duman, Serdar (Universitat Bundeswehr) Schulte, Axel (Universitat der Bundeswehr Munchen) |
| 6 | 32 | SIGMA: A Minimalistic 3D Hopping Robot with Parallel 3-RSR Mechanism for Safeguarding Humanitarian Demining | Fan, Chun Yin (Chinese University of Hong Kong) CHU, Xiangyu (The Chinese University of Hong Kong) Wong, Fei Yan Fiat (The Chinese University of Hong Kong) Shi, Fan (National University of Singapore) Au, K. W. Samuel (The Chinese University of Hong Kong) |
| 6 | 36 | Evaluation of Gesture-Based Communication for Firefighters During Search and Rescue | Mabulu, Katiso (Northeastern University) Vainqueur, Ben-oni (Northeastern University) Padir, Taskin (Northeastern University) |
| 6 | 55 | Analysis of Human Errors in Small Uncrewed Aerial Systems Used During Hurricane Ian | Murphy, Robin (Texas A&M) Manzini, Thomas (Texas A&M) Peres, S Camille (Texas A&M University) |
| 6 | 62 | A Framework for Casualty Manipulation with Biomechanical Joint-Level Reaction Analysis | Padua, Aldrin (Stevens Institute of Technology) Zhao, Qianwen (Stevens Institute of Technology) Roy, Rajarshi (Corvid Technologies) Spurlock, Chad (Corvid Technologies) Butz, Kent (Corvid Technologies) Lister, Kevin (Corvid Technologies) Wang, Long (Stevens Institute of Technology) |
| 6 | 87 | Multirotor Actuator Performance Monitoring in Extreme Environments | Charla, Sesha (Purdue University) Voyles, Richard (Purdue University) Yao, Bin (Guest Professor of Zhejiang University) |
| 6 | 92 | Optimizing Start Locations in Ergodic Search for Disaster Response | Rao, Ananya (Carnegie Mellon University) Hargis, Alyssa (United States Air Force Academy) Wettergreen, David (Carnegie Mellon University) Choset, Howie (Carnegie Mellon University) |
| 7 | 2 | Sensor Pods and ROS2-TMS for Construction for Cyber-Physical System at Earthwork Sites | Maeda, Ryuichi (Kyushu University) Kouno, Tomoya (Kyushu University) Matsumoto, Kohei (Kyushu University) Kasahara, Yuichiro (Kyushu university) Itsuka, Tomoya (Kyushu University) Nakashima, Kazuto (Kyushu University) Tamaishi, Yusuke (Kyushu University) Kurazume, Ryo (Kyushu University) |
| 7 | 6 | Development and Performance Validation for Ground Protection Mats of Construction Machinery on Soft Ground | Kubota, Yasuyuki (Kumagai Gumi Co., Ltd.) Furukawa, Atsushi (Kumagai Gumi Co., Ltd.) Kitahara, Shigeo (Kumagai Gumi Co., Ltd.) Amagai, Tetsuo (Kumagai Gumi Co., Ltd.) Asuma, Tsubasa (Kumagai Gumi Co., Ltd.) Hironobu, Hatamoto (Kumagai Gumi Co., Ltd.) Nagatani, Keiji (The University of Tokyo) |
| 7 | 56 | Assessing Ultra-Wideband Technology for Improved Detection of Vulnerable Road Users in Urban Settings | Huang, Jia (Texas A&M University) Gautam, Alvika (Texas A & M University) Choi, Junghun (Hyundai Motor Company) Saripalli, Srikanth (Texas A&M) |
| 7 | 57 | Use-Inspired Mobile Robot to Improve Worker Safety in Constrained Space Retrofitting | Suresh, Smruti (Northeastern University) Carvajal, Michael Angelo (Northeastern University) Hanson, Nathaniel (Massachusetts Institute of Technology) Holand, Ethan (Carnegie Mellon University) Hibbard, Sam (Northeastern University) Padir, Taskin (Northeastern University) |
| 7 | 67 | Development and Validation of a Drone-Deployable Water Depth Sensor for Landslide Dam Monitoring | Yajima, Ryosuke (The University of Tokyo) Nagatani, Keiji (The University of Tokyo) |
| 7 | 69 | The Radio Degradation Challenge: Fostering a Joint System Design of Robotics and Communication for Better Application Robustness | Patchou, Manuel (TU Dortmund University) Böcker, Stefan (TU Dortmund University) Wietfeld, Christian (TU Dortmund University) |
| 7 | 89 | Search and Rescue Base of Operation Prioritization with Aerial Orthomosaics | Hargis, Alyssa (United States Air Force Academy) Rao, Ananya (Carnegie Mellon University) Choset, Howie (Carnegie Mellon University) |
| 7 | 94 | Forest Biomass Mapping with Terrestrial Hyperspectral Imaging for Wildfire Risk Monitoring | Hanson, Nathaniel (Massachusetts Institute of Technology) Prajapati, Sarvesh (Northeastern University) Tukpah, James (Northeastern University) Mewada, Yash (Northeastern University) Padir, Taskin (Northeastern University) |
Venue & Accommodation
The main conference will be held at the NYU Tandon School of Engineering (370 Jay St, Brooklyn, NY 11201)

Conference attendees have access to two conveniently located hotels near the venue. Use the links below to access the room block. Please note these room blocks may fill up. The area immediately surrounding NYU has multiple other hotels at similar price rates, but without a guaranteed room block. Please contact the organizers if you need suggestions on accommodation.


Plenary Speakers

Jean-Paul Chertien, MD PhD
JP is a program manager with the Defense Advanced Research Projects Agency (DARPA) Biological Technologies Office, where he leads efforts integrating biomedical science and ML/AI for casualty care, mass casualty triage, diagnostics and exposure assessment, and other military and national security applications. Recently retired from the Navy after 20 years as a medical officer, his previous assignments include Pandemic Warning Team Lead, Defense Intelligence Agency; Senior Policy Advisor for Biodefense, White House Office of Science and Technology Policy; Innovation & Evaluation Team Lead, Armed Forces Health Surveillance Branch; Director of Force Health Protection, II Marine Expeditionary Force; and International Programs Coordinator, DoD-Global Emerging Infections System.
JP graduated from the US Naval Academy, where he was a Truman Scholar, and received his MD from the Johns Hopkins University School of Medicine and PhD (genetic epidemiology) and MHS (biostatistics) from the Johns Hopkins Bloomberg School of Public Health. He completed residency in Preventive Medicine at the Walter Reed Army Institute of Research and fellowship in Health Sciences Informatics at the Johns Hopkins University School of Medicine.

Seiga Kiribayashi, PhD
Seiga Kiribayashi received his Ph.D. from Tohoku University, Japan, in 2016 through research in rescue robotics. Following this appointment, he was a postdoctoral fellow at Tohoku University for three years, where he worked on unmanned aerial vehicle technologies. He is now a robotics software engineer developing a commercial security robots at SEQSENSE Inc. He serves as one of the members of the Robot Friendly Asset Promotion Association (RFA), which aims to accelerate the implementation of service robots. His passion is developing robots that work in real environments and help people live productive, safe lives.

Kris Dooley, MS
Kris Dooley is a program analyst at the National Urban Security Technology Laboratory (NUSTL), a government-owned and government-operated laboratory of the US Department of Homeland Security’s Science & Technology Directorate.
In her currently role, Ms. Dooley primarily leads test and evaluation (T&E) efforts at the laboratory under the System Assessment and Validation for Emergency Responders (SAVER) and Operational Field Assessment (OFA) programs. This includes the planning and execution of events focused on technologies geared towards first responders and the homeland security community. In support of these efforts Ms. Dooley has facilitated events including focus groups and hands-on operational assessments, on varying technologies ranging from enhanced rescue hoist gloves to unmanned aircraft systems. In addition, Ms. Dooley serves as NUSTL’s Quality Management System subject matter expert and provides oversite as needed. This includes the facilitating certification audits, guiding staff as well as developing and maintaining documentation to foster continual improvement.

Tyler Mackanin, MS
Tyler Mackanin is a Support Contractor for the National Urban Security Technology Laboratory (NUSTL), a government-owned and government-operated laboratory of the US Department of Homeland Security’s Science & Technology Directorate. Mr. Mackanin provides scientific and engineering support to NUSTL’s Test and Evaluation (T&E) Division. As a test engineer, he supports the System Assessment and Validation for Emergency Responders (SAVER), Operational Field Assessments and Counter Unmanned Aircraft Systems T&E programs. Mr. Mackanin is responsible for planning and executing test events as well as data collection, analysis and reporting. In supporting NUSTL’s first responder customers, Mr. Mackanin has led and supported projects covering a wide range of technology fields, including but not limited to surveillance, physical security, PPE, communications, and unmanned systems. Mr. Mackanin holds a B.E. in naval engineering and a M.S. in maritime systems from Stevens Institute of Technology.

Texas A&M University

Texas A&M University

Carnegie Mellon University

Carnegie Mellon University

Northeastern University

Northeastern University

German Rescue Robotics Center (DRZ)

German Rescue Robotics Center (DRZ)

University of Tokyo

University of Tokyo

New York University

New York University
Purdue University
Purdue University

George Mason University

George Mason University

Massachusetts Institute of Technology, Lincoln Laboratory

Massachusetts Institute of Technology, Lincoln Laboratory